Chapter 9: Rotation and Balance - Lesson 4: Angular Momentum
Summary of Linear and Rotational Motion Equations
Hold down the T key for 3 seconds to activate the audio accessibility mode, at which point you can click the K key to pause and resume audio. Useful for the Check Your Understanding and See Answers.
Making Connections
Throughout this chapter, we've encountered many parallel concepts and equations that show the similarities between translational (linear) motion and rotational motion. We've found it helpful to connect these with links—simple equations that allow us to find a rotational quantity knowing information about the linear quantity.
This final section is a summary that puts all these equations and links in one place. The hope is that, as you make connections, you'll be able to not only predict the rotational equations from their translational counterparts, but that you will be able to appreciate how rotational motion is an extension of all we've learned thus far.
Our investigations in this unit have looked back at four previous chapters representing four big ideas that help us understand the how and why of motion.

Let's summarize the parallels and links that we encountered as we explored the rotational counterparts of each.
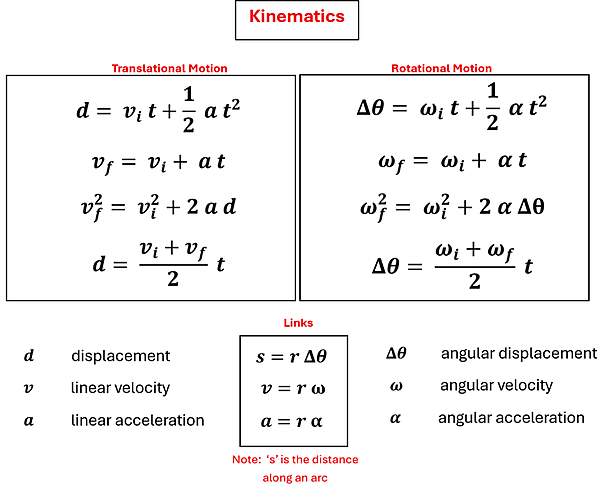
It is helpful to point out that we have used 'd' to represent an object's displacement—a length that represents the object's final position minus its starting position. While 's' is also a length, it is the curved distance along an arc. We've chosen to use two different variables to make this distinction clear.
In each of the link equations, 'r' connects the rotational and linear quantities. 'r' is the radius—the distance from the axis of rotation to the points where the linear quantities are being determined.
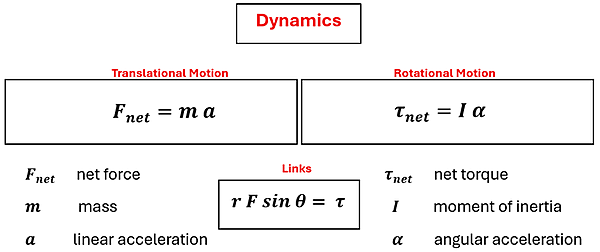
Once again, 'r' stands for radius. We describe it here as the lever arm—a vector length from the axis of rotation to the place where the force is being applied. Recall that 'θ' is the angle between the lever arm vector and the direction that the force is being applied.
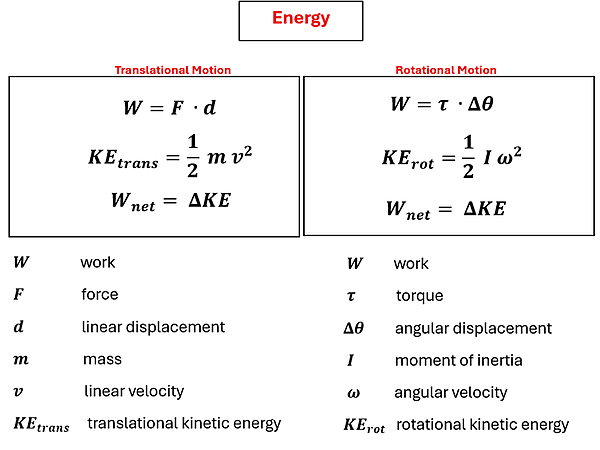
You may recall that when we introduced work in a previous chapter, we wrote W = F d cos q, in case the force and displacement are not in the same direction. While the same idea applies to torque and angular displacement, we'll limit our examples for rotational motion to situations where the direction of the torque (CW or CCW) is the same (or exactly opposite) as the direction of the angular displacement. For this reason, we did not include the 'cos q' term in either of the work equations above.
It's also noteworthy that the work-energy theorem, Wnet = ΔKE, applies to both translational and rotational motion. This makes sense since the net work done is how we change an object's kinetic energy, either its translational or rotational kinetic energy.
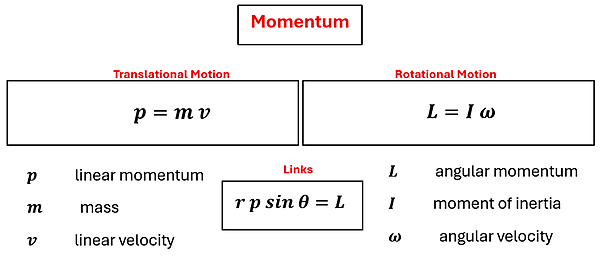
Yet again, 'r' stands for radius. We describe it here as the lever arm—a vector length from the axis of rotation to the place where the object with momentum is located. Recall that 'θ' is the angle between the lever arm vector and the direction that the momentum vector.
Beyond recalling the key equations we explored in this unit, the purpose of this summary is to help us see the forest for the trees. In other words, to see that the way we describe the rotational motion of objects is essentially the same as how we describe their linear motion, just with new variables. And making these connections will help us see that the above equations are not a whole new set of relationships to uncover, but rather a way to analyze rotational motion through our understanding of linear motion.
Check Your Understanding
Use the following questions to assess your understanding. Tap the Check Answer buttons when ready.
1: In each case, the variable used for a translational quantity, or its rotational counterpart, is missing. Identify the missing variable.
| Translational Quantity | Rotational Quantity |
|---|---|
TranslationalQuantity d | RotationalQuantity |
TranslationalQuantity | RotationalQuantity ω |
TranslationalQuantity | RotationalQuantity α |
TranslationalQuantity F | RotationalQuantity |
TranslationalQuantity m | RotationalQuantity |
TranslationalQuantity | RotationalQuantity L |
TranslationalQuantity KEtrans | RotationalQuantity |
2: Predict the rotational motion equation that corresponds to the given translational motion equation.
| Translational Equation | Rotational Equation |
|---|---|
TranslationalEquation d = vit + ½ a t2 | RotationalEquation |
TranslationalEquation vf2 = vi2 + 2 a d | RotationalEquation |
TranslationalEquation Fnet = m a | RotationalEquation |
TranslationalEquation KEtrans = ½ m v2 | RotationalEquation |
TranslationalEquation p = m v | RotationalEquation |
3: A 'link equation' is used to connect a translational quantity to its rotational counterpart. What single variable is part of each of these link equations?
4: Consider each of the following rotational quantities. Identify which are scalars and which are vectors by organizing them into this chart.
Angular velocity
Angular acceleration
Torque
Moment of Inertia
Work
Rotational Kinetic Energy
Angular momentum
| Scalar | Vector |
|---|---|
Scalar | Vector |
Scalar | Vector |
Scalar | Vector |
Scalar | Vector |
Scalar | Vector |